Bowen Jiang
I am a PhD student at UT Austin, advised by Prof. Roberto Martín-Martín. My current research focuses on dexterous manipulation.
From 2022 to 2024, I was a Master's student at the Robotics Institute (RI) at Carnegie Mellon University, advised by Prof. David Held and mentored by Wenxuan Zhou. My research focused on reinforcement learning and manipulation. Prior to CMU, I earned my B.S. in Engineering at Harvey Mudd College with distinction in 2022, with a concentration in Visual Arts. |

|
ResearchI'm interested in anything with arms and/or legs. |
|
HACMan++: Spatially-Grounded Motion Primitives for ManipulationBowen Jiang*, Yilin Wu*, Wenxuan Zhou, Chris Paxton, David Held RSS 2024, 2024 arxiv / code / website / We present HACMan++, a reinforcement learning framework using a novel action space of spatially-grounded parameterized motion primitives for manipulation tasks. |
|
HACMan: Learning Hybrid Actor-Critic Maps for 6D Non-Prehensile ManipulationWenxuan Zhou, Bowen Jiang, Fan Yang, Chris Paxton*, David Held* Conference of Robot Learning 2023 (Oral), 2023 arxiv / code / website / We propose a spatially-grounded and temporally-abstracted action representation with a hybrid discrete-continuous reinforcement learning framework. |
|
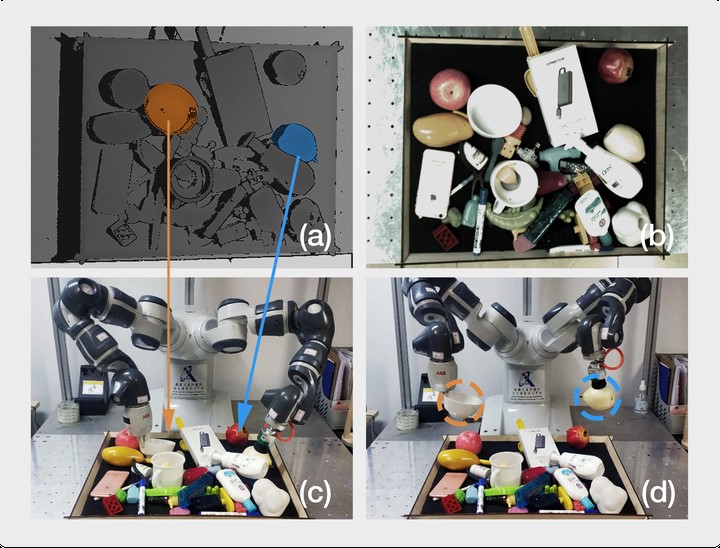
POIS: Policy-Oriented Instance Segmentation for Ambidextrous Robot PickingGuangyun Xu*, Yi Tao*, Bowen Jiang*, Peng Wang, Jun Zhong IEEE International Conference on Robotics and Automation (ICRA) 2021, 2021 code / website / We propose policy-oriented Instance Segmentation for Ambidextrous Robot Picking, which predicts a pair of target masks allowing ambidextrous robots to pick objects in cluttered scenes without mutual interference. |
|
Design and source code from Jon Barron's website |